- Electric motors
-
Operating parts - standard elements
- Clamping levers, tension levers, cam levers
- Grips, knobs
- Pull handles, tubular handles, recessed handles
- Handwheels, crank handles, position indicators
- Quarter-turn locks, compression latches
- Hinges
- Swivel feet, levelling feet
- Tube connectors, profile connectors
- Telescopic slides
- Latches
- Toggle clamps, power clamps
- Clamping elements
- Spring plungers, indexing plungers, ball lock pins
- Support elements, locating elements, stop elements
- Machine and fixture components
- Joints
- Magnets
- Buffer elements
- Level indicators, screw plugs
- Scales, scale rings, level vials
- Material handling
- Profile systems
- Energy chains
- Gearboxes
- Industrial robots
- Other products
- Home
- Industrial robots
- 3-Axis SCARA Robot
3-Axis SCARA Robot

- Lightweight and flat, with a mass starting from 7.6 kg and a height starting from 137 mm
- Able to approach narrow spaces
- The 3rd arm can be freely designed to fit the equipment
- Maximum reach 410 mm/460 mm/700 mm, payload 3-10 kg
- Drive Motor: AZ Series with battery-free built-in absolute encoder (DC input)
Features
Flat SCARA Robot
Compared to general SCARA robots, the flat design allows the robot to handle narrow spaces, such as for attaching and detaching parts to and from equipment.
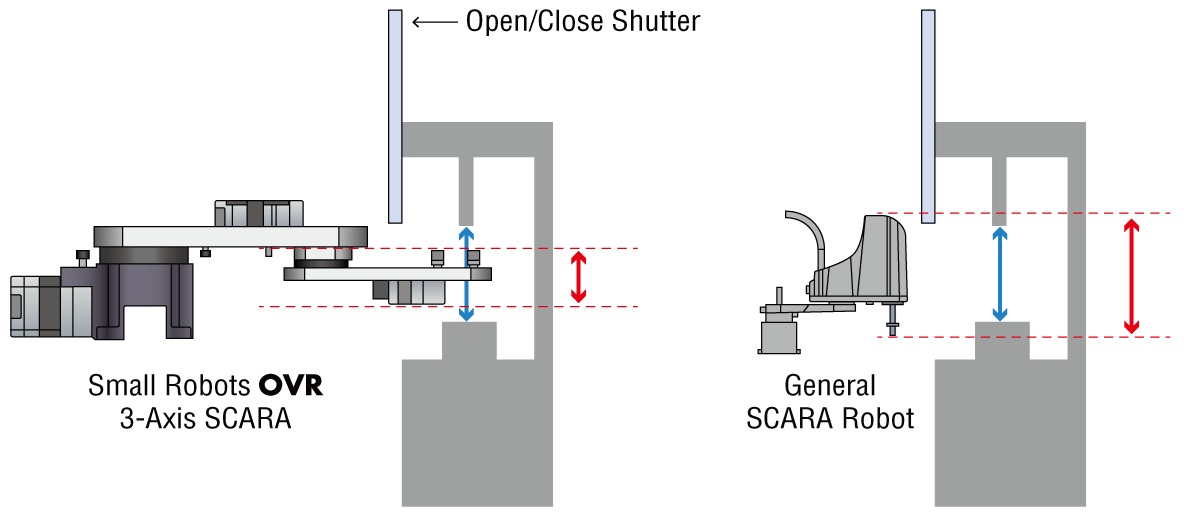
Here are introducing load transfer operations when combined with the electric lifting columns EL Series.
- The vertical operating range can be easily expanded by lifts and lowers the robot body.
- The height of the robot tip can be reduced, allowing the robot to approach narrow spaces.
- No need to design an external guide or arrange parts, reducing the equipment startup time.
Features and Types
| Product Name | OVR3041K3-H | NEWOVR3046K10-H | NEWOVR3070K3-H | |||
|
 |
 |
 |
|||
| Features | ・Flat and lightweight |
|
・Long stroke | |||
| ・Omni-directional movement shortens takt time | ・Omni-directional movement shortens takt time | |||||
| ・Simple dust-resistant structure | ・Simple dust-resistant structure | |||||
| ・Low cost | ||||||
| Maximum Reach | 410 mm | 460 mm | 700 mm | |||
| Maximum Transportable Mass | 3 kg | 10 kg | 3 kg | |||
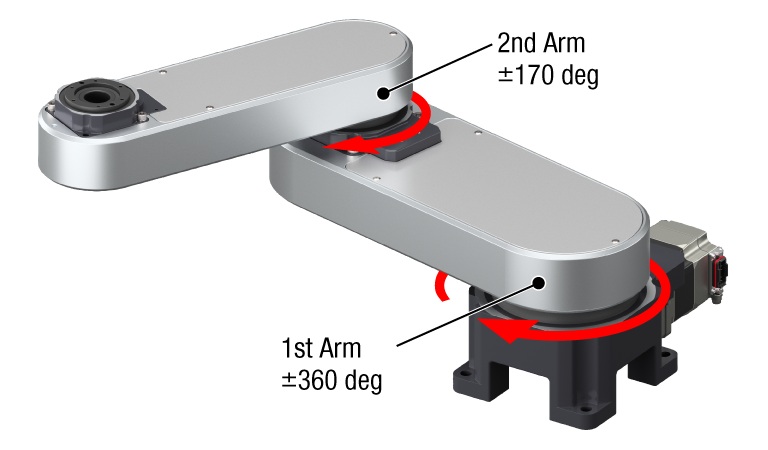
| Movable Range* | 1st Axis | ±170 deg. | ±360 deg. | ±360 deg. | ||
| 2nd Axis | ±140 deg. | ±170 deg. | ±170 deg. | |||
| Cover | - | With cover | With cover | |||
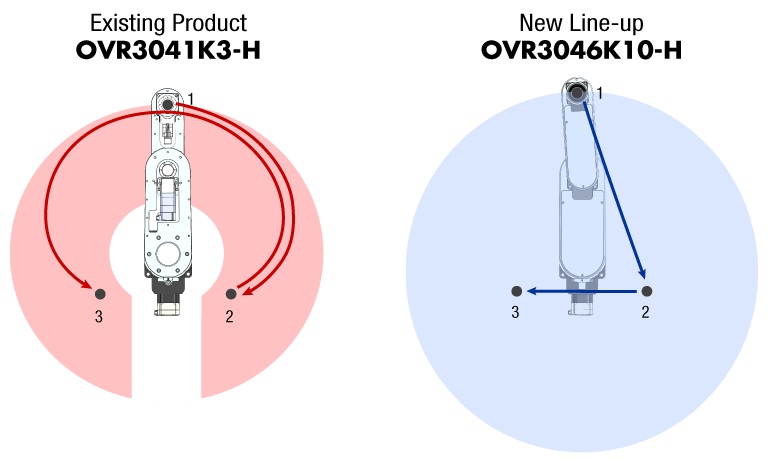
Omni-directional movement shortens takt time
Products capable of omni-directional motion are available.
Operation Comparison Between the Existing Product and the New Lineup
The new lineup of omni-directional movement allows the arm can pass over the robot, allowing for an optimal approach distance.
This makes the takt time can be reduced by 37% compared to existing products.
Operating Range
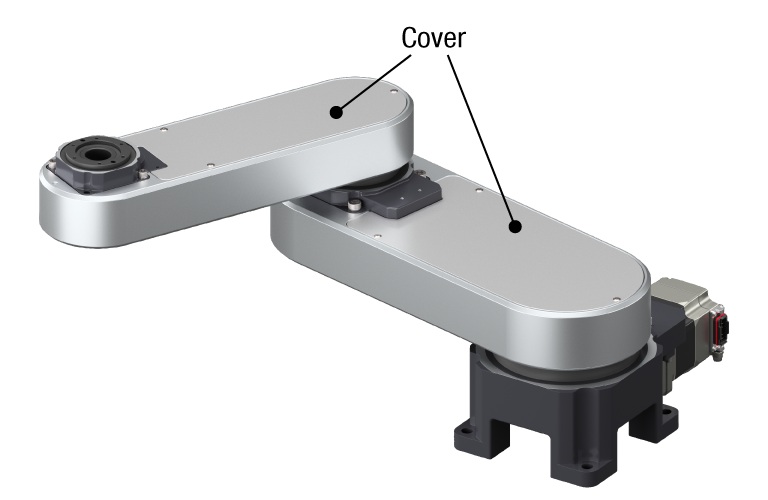
Simple Dust-Resistant Structure
Products equipped with a simple dust cover are available. This cover prevents foreign matter intrusion and reduces cable abrasion.
Customizable Design to Fit Your Equipment




Application Example
This robot’s design can be freely customized according to the application.
- Flat and compact structure
- The third arm can be freely designed
- Combining with electric lifting columns and actuators expands the movable range not only horizontally but also vertically
Example 1: Lifting the Robot Body
The height of the robot tip can be reduced, allowing the robot to approach narrow spaces. No horizontal barriers allow for omni-directional operation.
Installation Type: Floor-mounted, ceiling-mounted
Vertical Stroke: Short to medium (50~300 mm)
| ➀ | Small Robots OVR 3-Axis SCARA OVR3070K3-H |
|---|---|
| ➁ | Electric Lifting Columns EL Series EL1210AZMK |
Example 2: Robot Body Vertical Operation
The height of the robot tip can be reduced, allowing the robot to approach narrow spaces. Compatible with a wide range of vertical operations.
Installation Type: Wall-mounted *For the omnidirectional type, some parts cannot be moved
Vertical Stroke: Short to long
| ➀ | Small Robots OVR 3-Axis SCARA OVR3041K3-H |
|---|---|
| ➁ | Mounting Bracket PDG130-6 |
| ➂ | Actuator Manufactured by FESTO EGC-HD-125-BS |
Example 3: End Effector Vertical Operation
Compact vertical operation is possible.
Installation Type: Floor-mounted
Vertical Stroke: Short (30 mm)
| ➀ | Small Robots OVR 3-Axis SCARA OVR3041K3-H |
|---|---|
| ➁ | Mounting Bracket PDG60-4 |
| ➂ | Compact Electric Cylinders DR28T■■03-AZAKD |
| ➃ | Electric Gripper EH Series EH4-AZAKH |
Example 4: End Effector Rotary Drive
The angle of the end effector can be changed, such as inverting the workpiece.
Installation Type: Floor-mounted, ceiling-mounted
| ➀ | Small Robots OVR 3-Axis SCARA OVR3041K3-H |
|---|---|
| ➁ | AZ Series Motors + Harmonic Drive Systems Gears AZM24AK + CSF-8-■-2UP-SP-A |
| ➂ | Mounting Bracket PDG60-5 |
| ➃ | Robot Flange Adapter P3F2 |
| ➄ | Electric Gripper EH Series EH4-AZAKH |
Useful accessories are available to facilitate quick installation of the robot.



